圆弧边缘缺陷检测
圆弧边缘缺陷检测模块可检测工件或产品上的弧边缘缺陷,如断裂、凹陷、凸点、磨损等问题。
本节内容包含:
模块原理
该模块的主要检测途径是在圆弧上自动创建一定数量的卡尺,比对相邻卡尺中部分圆弧中心点x轴、y轴和角度偏移,并根据预设的阈值大小判断缺陷是否成立。
如下图所示,检测结果中红框标注部分即圆弧缺陷,绿点即正常的圆弧边缘。
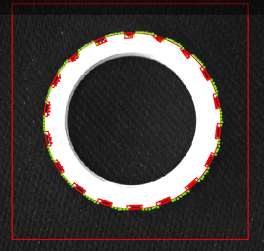 图 1 检测结果示例
图 1 检测结果示例使用方法
在流程中,圆弧边缘缺陷检测模块的前后序模块详情如下。
|
前后序模块 |
描述 |
|---|---|
|
前序模块 |
通常为图像源,为圆弧边缘缺陷检测提供图像输入。前序模块还可包括圆查找,以实现更精确的目标定位 |
|
后序模块 |
无特定要求 |
圆弧边缘缺陷检测具体的配置方法如下图所示,当圆轮廓比较模糊时建议开启标准输入。
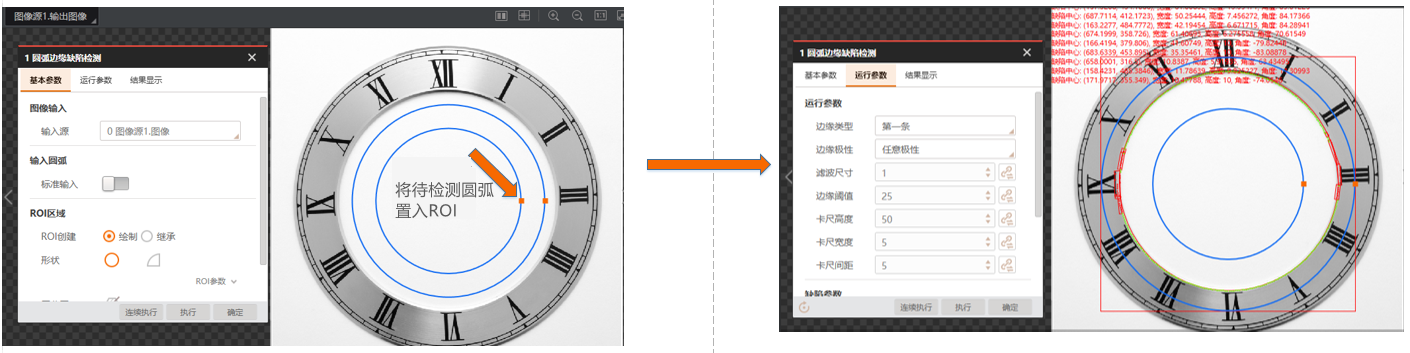 图 2 配置方法简易图示
图 2 配置方法简易图示参数配置
|
参数 |
描述 |
|
|---|---|---|
|
圆输入 |
可以选择“按圆”输入,直接链接前面圆查找的输出圆。也可以选择“按参数”自定义圆的圆心坐标、半径 |
|
|
ROI区域 |
可以继承也可以绘制ROI区域 |
|
|
边缘类型 |
有最强、第一条和最后一条三种类型 |
|
|
边缘极性 |
有从白到黑、从黑到白和任一极性三种极性 |
|
|
滤波尺寸 |
用于增强边缘和抑制噪声,最小值为1。当边缘模糊或有噪声干扰时,增大该值有利于使得检测结果更加稳定,但如果边缘与边缘之间距离小于滤波尺寸时反而会影响边缘位置的精度甚至丢失边缘,该值须要根据实际情况设置 |
|
|
边缘阈值 |
边缘阈值即梯度阈值,范围0~255,只有边缘梯度阈值大于该值的边缘点才被检测到。数值越大,抗噪能力越强,得到的边缘数量越少,甚至导致目标边缘点被筛除 |
|
|
卡尺高度 |
在ROI中环形分布若干个边缘点查找ROI,该值描述扫描边缘点查找ROI的区域高度。当边缘查找不准确时可适当增大该值 |
|
|
卡尺宽度 |
在一定范围内增大该值可以获取更加稳定的边缘点 |
|
|
卡尺间距 |
在ROI中环形分布若干个边缘点查找ROI,每个ROI之间的像素间距 |
|
|
缺陷极性 |
有轨迹左侧、右侧和轨迹两侧等三种极性,沿着检测框BOX的方向看,检测边缘的左侧为轨迹左侧,其他的依次对应 |
|
|
缺陷距离阈值 |
边缘点距离拟合直线的距离,若距离大于阈值,则判定为待筛选缺陷点,若尺寸或面积使能打开,则需要进一步根据对应阈值进行筛选 |
|
|
缺陷尺寸使能 |
多个缺陷点投影到拟合直线,组成的像素尺寸大于阈值,则判定为缺陷尺寸生效 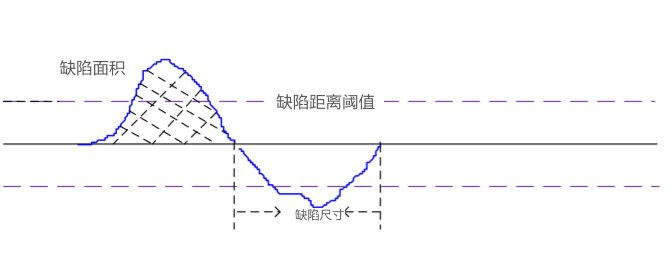
|
|
|
缺陷面积使能 |
缺陷轮廓与标准直线围成的面积是缺陷面积,缺陷面积在使能设置范围内的缺陷才可能被查找到,如下图所示 |
|
|
参数 |
描述 |
|---|---|
|
卡尺数量 |
用于扫描边缘点的ROI区域数量 |
|
剔除点数 |
误差过大而被排除不参与拟合的最小点数量。一般情况下,离群点越多,该值应设置越大,为获取更佳查找效果,建议与剔除距离结合使用 |
|
剔除阈值 |
允许离群点到拟合圆的最大像素距离,值越小,排除点越多 |
|
追踪容忍度 |
边缘追踪所允许偏移的最大像素 |
模块结果
该模块输出结果中各项参数详情,请参见仿射变换模块的输出结果。