边缘位置趋势分析
边缘位置趋势分析模块可通过边缘点的距离信息分析出物体边缘的走势,输出图像中“边缘点坐标”和“边缘点与ROI边缘距离”等位置信息。通过这些信息可进一步获取到期望的图像边缘点。
本节包含如下内容:
模块原理
该模块工作原理如下。
-
根据预设的运行参数在ROI区域内获取符合要求的卡尺区域集合。
-
在每个卡尺区域获取一个边缘点,并获取所有边缘点到ROI上边线的距离信息(同时可获取其中的最大值、最小值、平均值等)。
-
根据设置的距离阈值提取满足要求的点集,并得到该点集距离中的最大距离、最小距离及平均距离,同时分别输出一个最大距离和最小距离对应的点。
使用方法
该模块前序后模块详情见下表。
|
前后序模块 |
描述 |
|---|---|
|
前序模块 |
如果待检测目标在视野内存在位姿变化,该模块的前序模块一般可包括图像源、模板匹配、BLOB分析和位置修正等。其中模板匹配或BLOB分析用于进行粗定位,位置修正用于实时修正检测区域。 如果待检测目标在视野内无位姿变化,该模块可仅与图像源搭配使用。 |
|
后序模块 |
该模块后序模块可接点集,以获取图像边缘点和最大/最小距离点。 |
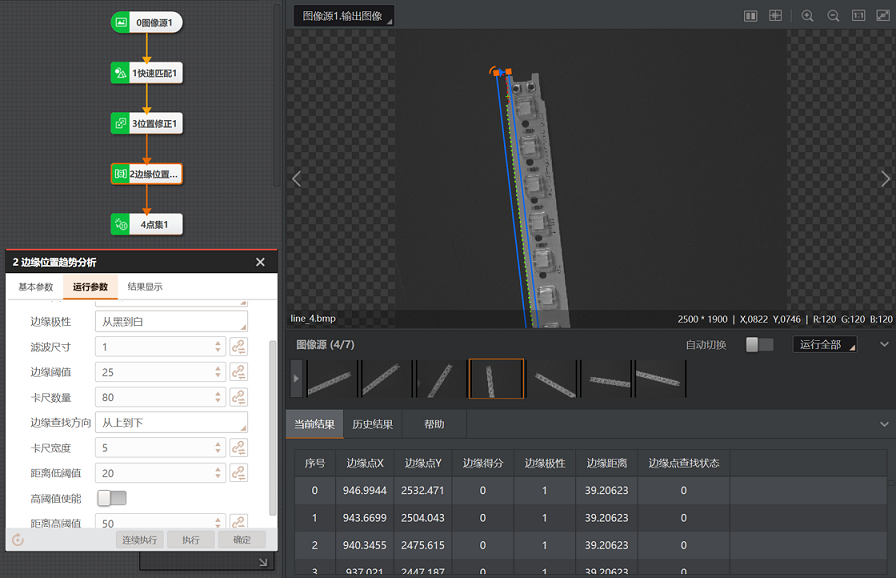 图 1 应用示例
图 1 应用示例参数配置
以下仅介绍该模块的运行参数详情。通过配置运行参数,可定义当前模块如何处理输入的数据。
|
参数 |
描述 |
|---|---|
|
边缘类型 |
可设置边缘检测的类型,可选最强、第一条边缘和最后一条边缘。
|
|
边缘极性 |
可设置边缘检测的极性,可选任意极性、从黑到白、从白到黑。
|
|
滤波尺寸 |
用于增强边缘和抑制噪声,最小值为1。需根据实际需求设置。 当边缘模糊或有噪声干扰时,增大该值有利于使检测结果更稳定。但若边缘与边缘之间距离小于滤波尺寸,反而会影响边缘位置的精度甚至丢失边缘。 |
|
边缘阈值 |
边缘阈值即梯度阈值,范围0~255。 当边缘梯度阈值大于该值的边缘点,方可被检测到。 数值越大,抗噪能力越强,得到的边缘数量越少,甚至导致目标边缘点被筛除。 |
|
卡尺数量 |
查找ROI区域内,用于扫描边缘点的卡尺ROI数量。 |
|
边缘查找方向 |
可设置查找边缘的方向,可选从上到下、从左到右。
|
|
卡尺宽度 |
即查找边缘点ROI的区域宽度,在一定范围内增大该值可获取更稳定的边缘点。 同时边缘点ROI的区域高度由查找ROI的高度决定。 |
|
距离低阈值 |
对应距离最小值。需配合高阈值一起使用,高阈值相关介绍请见高阈值使能和距离高阈值参数。
|
|
高阈值使能 |
开启该功能时,根据所有边缘点集的边缘距离分布自适应计算距离高阈值;关闭该功能时,则自定义设置距离高阈值。 |
|
距离高阈值 |
仅在关闭高阈值使能时,有该参数。对应距离的最大值。 |
模块结果
该模块输出结果中各项参数详情,请参见边缘位置趋势分析的输出结果。