线线测量
本节内容包含:
使用方法
线线测量模块通过测量直线每个找到的边缘点向对面的线做垂线,计算距离然后求其平均值,平均值即为线线距离。该模块多用于工业生产中工件上两边间距以及夹角的测量,例如测量工件两边距离平均值、判断工件两边夹角是否在合格范围内,根据测量结果确认工件规格型号以及确认工艺是否合格。
线线测量模块一般与直线查找、直线查找组合、多直线查找等可以输出线段数据信息的模块配合使用,直线查找、直线查找组合、多直线查找等模块作为前序模块,通过定位到图像中需要测量的线并输出对应坐标数据给线线测量模块,线线测量模块通过订阅接收参数,经过计算输出两线段的绝对距离、交点、夹角等参数。
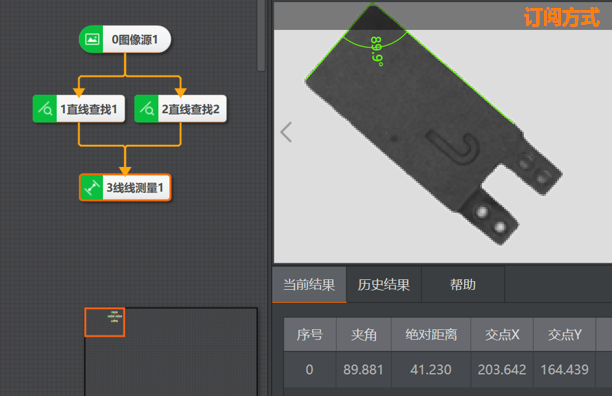
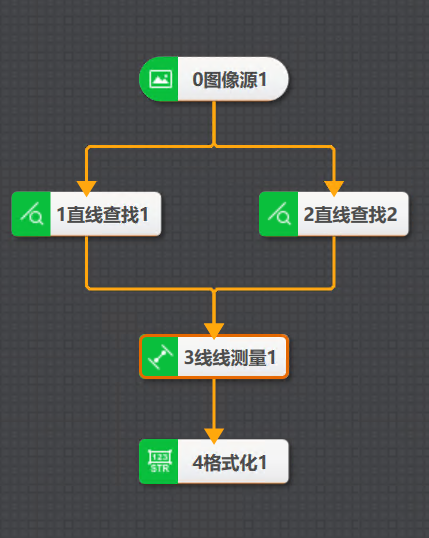 图 1 线线测量示例
图 1 线线测量示例该示例通过定位图像中工件两条斜边,将坐标数据输入至线线测量模块,完成工件两边夹角角度测量的应用。
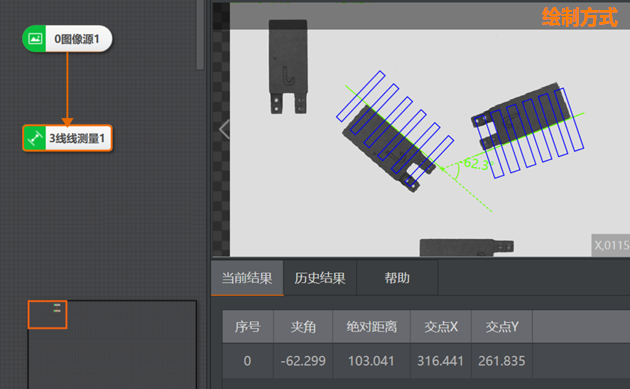
 图 2 线线测量执行结果
图 2 线线测量执行结果参数配置
基本参数如下:
运行参数如下:
- 选择直线
-
可选直线1或直线2。
- 边缘类型
-
-
最强:只检测扫描范围内梯度最大的边缘点集合并拟合成直线。
-
第一条:满足条件的第一条直线。
-
最后一条:满足条件的最后一条直线。
-
接近中线:查找最接近区域中线且满足条件的直线。
-
- 边缘极性
-
-
从黑到白:从灰度值低的区域过渡到灰度值高的区域的边缘。
-
从白到黑:从灰度值高的区域过渡到灰度值低的区域的边缘 。
-
任意极性:上面两种边缘均被检测。
-
- 边缘阈值
-
只有当图像中的边缘灰度差大于所设置的边缘阈值才能被检测出。数值越大,抗噪能力越强,得到的边缘数量越少。
- 滤波尺寸
-
描述目标边缘的清晰程度,最小值为1,值越小,表示边缘越清晰且过渡带小。当边缘模糊或有噪声干扰时,增大该值有利于使得检测结果更加稳定,如果边缘之间距离小于滤波尺寸,会影响边缘位置的精度。
- 剔除点数
-
误差过大而被排除不参与拟合的最小点数量。一般情况下,离群点越多,该值应设置越大,可以获得更佳的查找效果。
- 剔除距离
-
允许离群点到直线的最大像素距离,超过该距离的点会被排除,值越小,排除点越多。
- 初始拟合
-
-
全局:使用查找得到的全局特征点进行直线拟合。
-
局部:按照局部的特征点拟合直线,若局部特征可以更好的体现直线所在位置则采取局部,否则采取全局。
-
- 拟合方式
-
包括最小二乘、huber和tukey三种。三种拟合方式只是权重的计算方式有些差异。随着离群点数量增多以及离群距离增大,可逐次使用最小二乘、huber、tukey。
- 输出角度范围
-
设置后可执行输出符合该角度范围内的结果,可选-90°-90°或-180°-180°。
说明:角度是指直线交点与两条直线终点方向形成的角,如下图∠α。其输出的正负关系为:从直线1到直线2方向,顺时针为正,逆时针为负,如下图,左图为负,右图为正。
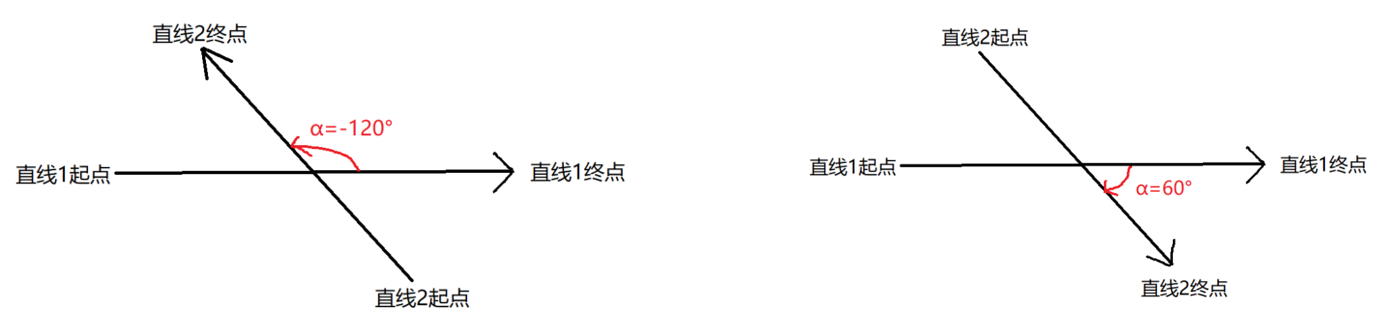 图 5 线线角度示意图
图 5 线线角度示意图
模块结果
该模块的模块结果介绍请见线线测量。