标定板标定
标定板标定模块可通过输入的标定板图像,根据图像坐标位置和物理坐标位置,计算并输出图像坐标系到物理坐标系的转换关系(即标定文件)。得到转换关系后,可以将图像中标定板平面上的任意一个像素点转换到对应的物理坐标系当中。
标定板标定的结果只能将与标定板处于同一平面内的像素转换至标定板物理坐标系中,与标定板不处于同一平面内的像素点无法利用标定板标定的结果进行坐标系转换。
 图 1 模块运行效果
图 1 模块运行效果本节内容包含:
模块原理
进行标定板标定时,可使用多种不同类型的棋盘格,具体分为棋盘格标定板、圆标定板、海康标定板(包括海康标定板I型、海康标定板II型、海康扩展标定板I型、海康扩展标定板II型)。海康标定板的原理为在棋盘格标定板的基础上,部分棋盘格用带位置信息的码替代。其中I型标定板为1个码占据4个棋盘格位置,II型标定板为码均放置在标定板的白格中。各类型标定板示意图如下图所示。
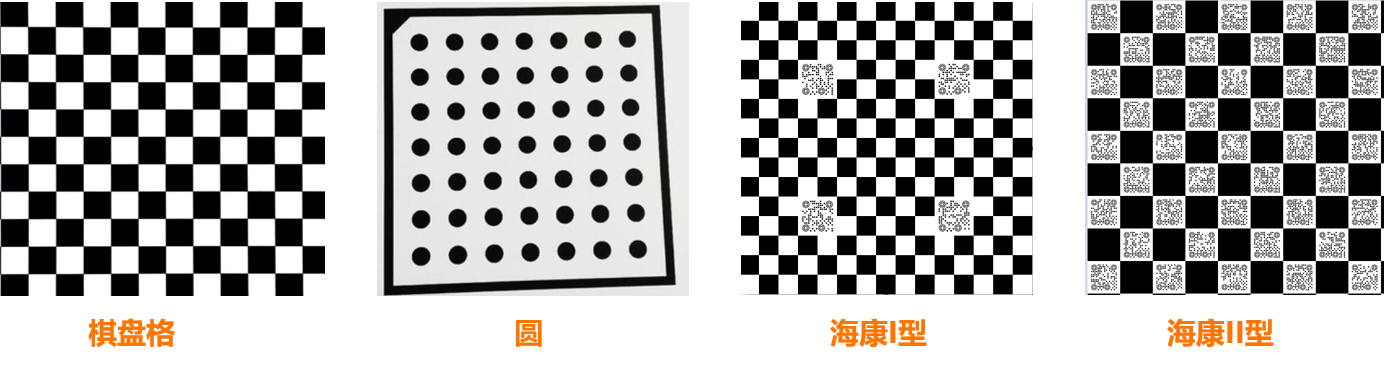 图 2 标定板类型
图 2 标定板类型-
海康常规标定板的行数和列数最大支持255,海康扩展标定板的行数和列数最大支持1024,其余没差别。
-
海康标定板可通过VM自带的标定板生成工具生成。
海康标定板与其他两种标定板相比,由于码已记录角点的物理坐标信息和方向信息,故其自带一个物理坐标系。当该模块选择的标定板类型为海康标定板时,VM直接使用其自带的物理坐标系。
以上四种类型的标定板其图像坐标系均为:图像左上角为坐标原点,水平向右为X轴,垂直向下为Y轴。但不同类型标定板的物理坐标系存在差异:
-
棋盘格标定板/圆标定板:以左上角第一个角点为坐标原点,坐标轴与棋盘格的边平行。
说明:当提取到的角点列数大于行数时,坐标系的位置和方向会发生变化,特征点数量较多的方向为X轴,如下图所示。
-
海康标定板:由于码记录角点的物理坐标信息和方向信息,因此无论标定板如何放置,都有相同的默认物理坐标系。
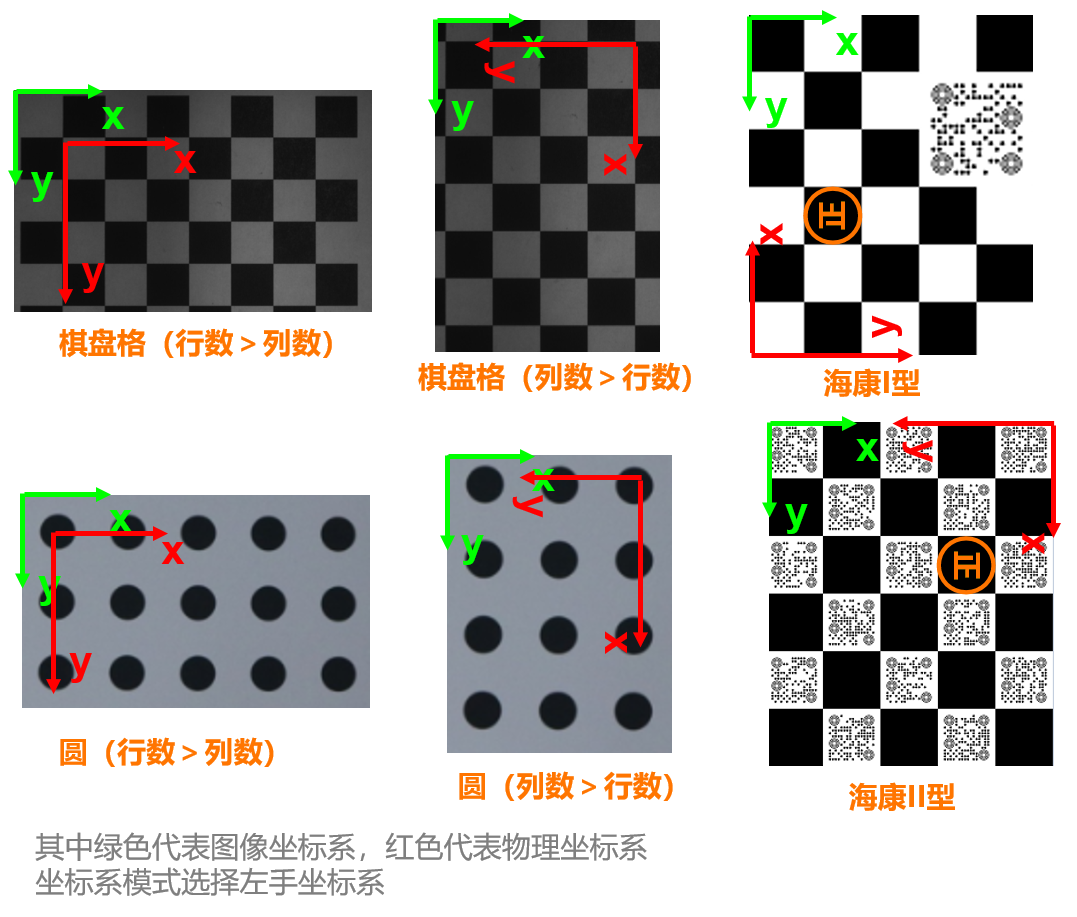 图 3 标定板坐标系示意图
图 3 标定板坐标系示意图不同标定板类型适用的场景有所差异:
-
若仅需使用一个相机,由于此时无需过多关注标定的物理坐标系的原点位置,推荐使用棋盘格标定板或圆标定板。
-
若需要使用多个相机且多个相机需转换到同一个物理坐标系,由于每个相机的视野不同,拍摄的棋盘格区域也有所不同,推荐使用海康标定板。
说明:使用海康标定板时,需解译标定板上的码,此时需保证所拍摄标定板的图像中码足够大且足够清晰(推荐码占据100个像素左右),否则可能导致标定失败。
使用方法
该模块主要在测量和定位类项目中使用。
-
测量类项目:可使用该模块的标定结果将图像中的特定点转换到物理坐标系下,然后在物理坐标系进行测量。
-
定位类项目:可借助该模块实现多个相机坐标系的关联。使多个相机标定到同一个物理坐标系下。
该模块使用时,需确保前序模块有图像源模块。图像源模块用于获取标定板的图片,供该模块标定使用。
参数配置
此处仅对该模块基本参数的标定文件以及运行参数进行介绍,基本参数的图像输入和结果显示各模块大同小异,此处不再赘述,具体参见基本参数和结果显示。
-
基本参数的标定文件:
- 标定文件路径
- 更新文件
- 生成标定文件
-
以上3个参数为标定类模块共有参数,功能与操作基本一致,相关介绍参见N点标定中相关参数的介绍。
-
运行参数:
- 原点X
- 原点Y
-
可设置默认物理坐标系原点进行X/Y方向的平移,单位为mm。该参数数值为负数时,以X/Y轴反方向平移;该参数数值为正数时,以X/Y轴正方向平移。
- 旋转角度
-
可设置物理坐标系的旋转方向和角度。该参数数值为负数时,以逆时针方向旋转对应的角度;该参数数值为正数时,以顺时针方向旋转对应的角度。
- 坐标系模式
-
可设置物理坐标系的类型,可选左手坐标系和右手坐标系。两种坐标系如下图所示。
说明:假设下图中棋盘格中各个格子的边长为1mm,则上述4个参数的设置效果如下图所示。
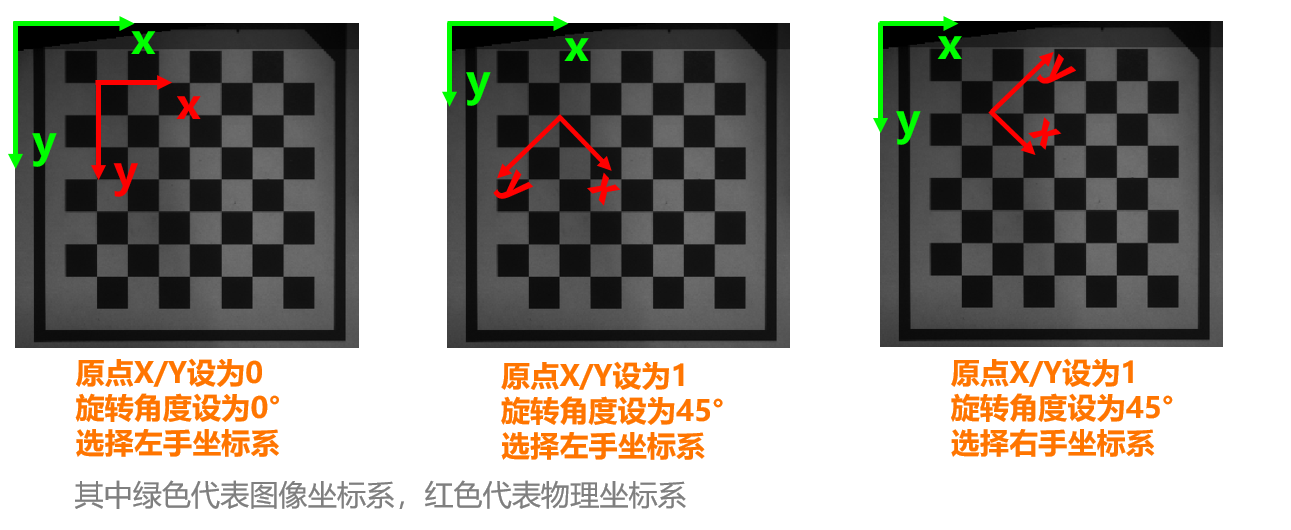 图 4 运行参数设置效果
图 4 运行参数设置效果 - 物理尺寸
-
对应棋盘格各个格子的边长或圆点阵中相邻圆的圆心距,单位为mm。
说明:该参数需根据标定板上的真实大小填写,否则标定得到的转换关系会失真。
- 标定板类型
-
可选棋盘格标定板、圆标定板、海康标定板I型、海康标定板II型、海康I型扩展、海康II型扩展。各类型标定板的介绍请参见上文的模块原理。
选择不同类型的标定板,部分需设置的参数有所差异。
- 自由度
-
可设置拟合homo矩阵时的自由度。可选缩放、旋转、纵横比、倾斜、平移及透射(透视变换),缩放、旋转、纵横比、倾斜及平移(仿射变换)和缩放、旋转及平移(相似性变换)这三种,自由度逐步降低,推荐使用默认选项。
举例:正方形通过透视变换可能会变成梯形,通过仿射变换可能会变成矩形,通过相似性变换虽还是正方形但大小会发生变化。
- 权重函数
-
可选最小二乘法、Huber、Tukey三种算法权重函数,推荐使用默认选项。
选择Huber或Tukey时,需设置权重系数参数。
模块结果
该模块的模块结果涉及参数请参见标定板标定。
调试建议
使用该模块标定时,若反馈标定失败。可按照以下方法操作看能否解决。
-
确认图像源模块输入的图像是否为标定板图像。
-
确认标定板类型参数的选择是否正确,需和图像源模块输入的标定板图像的类型保持一致。
-
确认其他参数是否设置合理。例如圆标定板的圆点类型是否与实际标定板图像类型一致,点圆度参数是否设置的过大,边缘提取阈值参数是否设置的不合理。