位置修正
位置修正模块可根据模板匹配结果实时修正后序模块的ROI。该模块常用于修正目标的运动偏移,实现精确定位。
本节包含如下内容:
模块原理
该模块的算法工作流程包括以下三个主要步骤:
-
获取模板匹配输入的位置信息。
-
基于输入的位置信息,在基准图像中创建基准点。
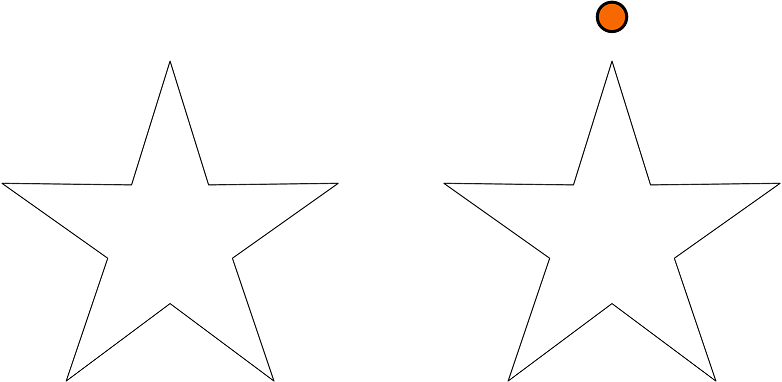
例如在以下左图中选取右侧五角星上方的橙色点作为基准点。
-
计算待修正图像中相对于基准点的偏移和旋转角度等信息。
-
在待修正图像中标注基准点。
待修正图像中的基准点与基准图像中的基准点坐标相同。
-
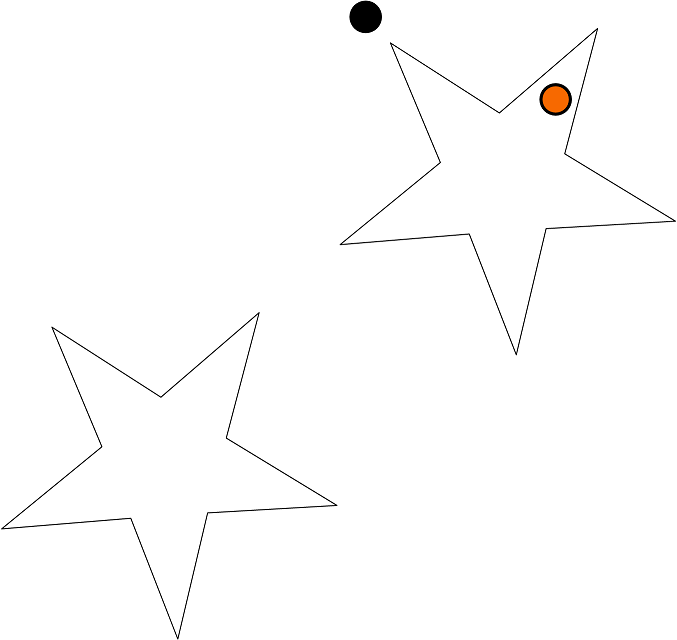
基于模板匹配在待修正图像中匹配到的目标,在待修正图像中找出另一个点(以下称为“运行点”)。运行点相对目标的位置,与基准图像中基准点相对于目标的位置一致。例如以下右图中的黑点,其相对于五角星的位置与左图中的橙点一致。
-
在待修正图像中,对比运行点和基准点的位置,即可计算出待修正图像中的目标相对于基准图像的位姿变化信息。
-
|
基准图像 |
待修正图像 |
|---|---|
|
|
使用方法

参数配置
以下仅介绍该模块的运行参数详情。通过配置运行参数,可定义当前模块如何处理输入的数据。
说明:
结果显示参数详情,请参见结果显示。
|
子参数 |
次级子参数 |
描述 |
|---|---|---|
|
按点 |
原点 |
选择或输入基准点的位置。 |
|
角度 |
原点基于水平线的角度。 |
|
|
X方向尺度 |
图像在X轴方向上的伸缩尺度。 |
|
|
Y方向尺度 |
图像在Y轴方向上的伸缩尺度。 |
|
|
按坐标 |
原点X/Y |
选择或输入基准点的X/Y轴坐标。 |
|
角度 |
原点基于水平线的角度。 |
|
|
X方向尺度 |
图像在X轴方向上的伸缩尺度。 |
|
|
Y方向尺度 |
图像在Y轴方向上的伸缩尺度。 |
注意事项
模块结果
该模块输出结果中各项参数详情,请参见位置修正模块的输出结果。