目标跟踪
目标跟踪模块可用于对目标物体进行跟踪和计数。
本节内容包含:
模块原理
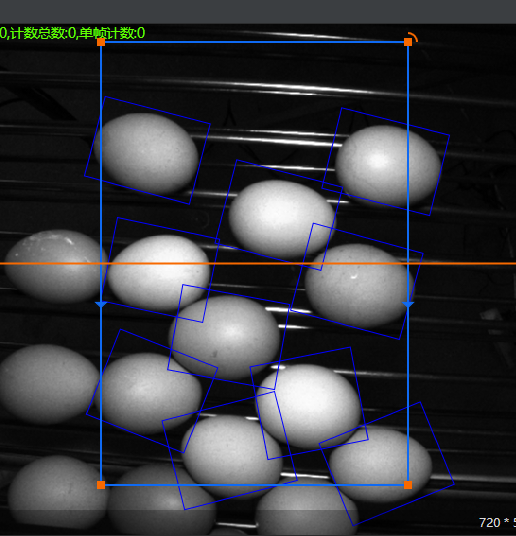
通过该模块,可实现对产线上目标物体的跟踪和计数。示例场景如下图所示。
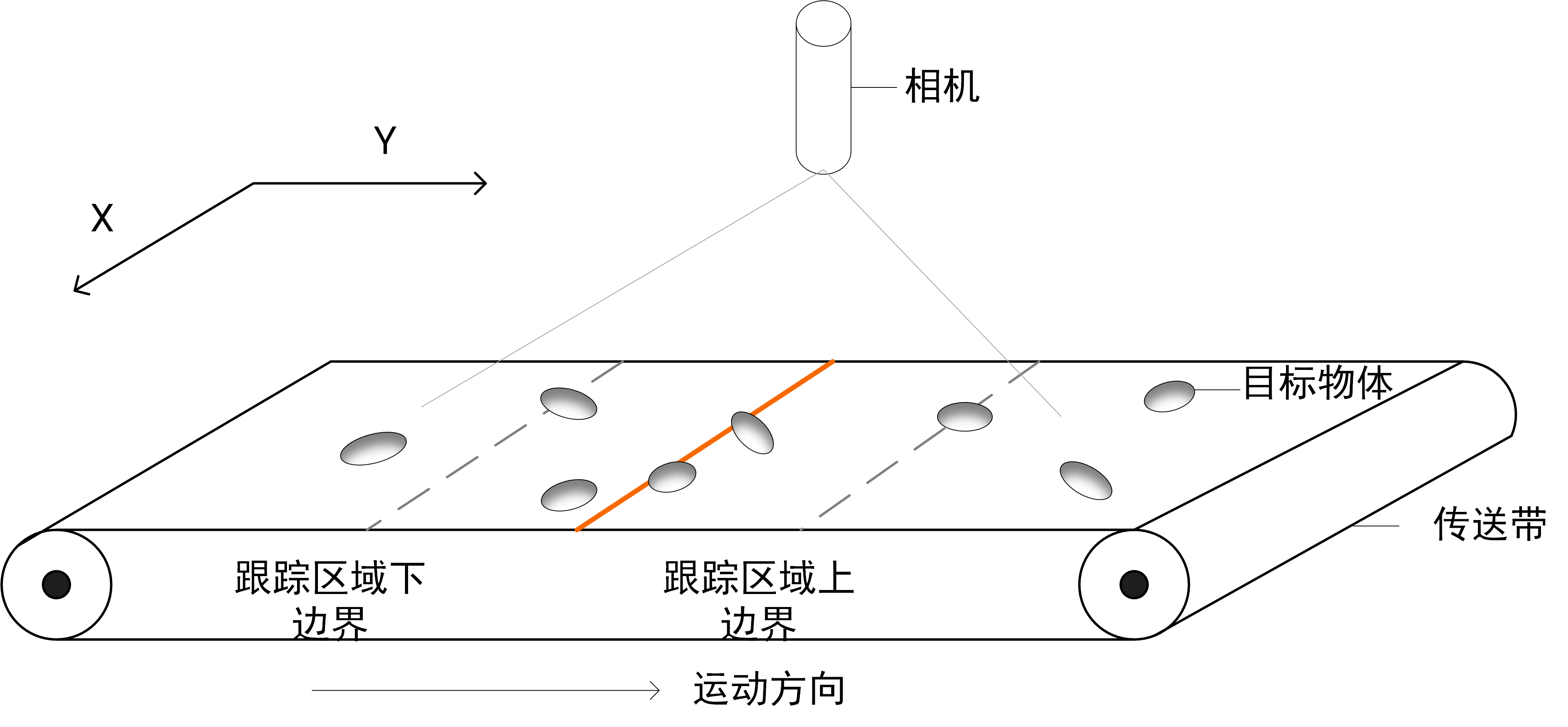 图 1 场景示意图
图 1 场景示意图目标跟踪和计数,基于算法对以下五个元素的处理和计算实现。
-
ROI:在相机采集图像中预设的感兴趣区域(Region of Interest,ROI)。
-
计数线:一般为ROI在跟踪方向(即目标移动方向)上的中线,即上图和下图中的橙线。
-
有效计数目标:进入ROI且越过计数线的目标物体。出现在图像中,但是不符合上述条件的物体,不产生计数值累加。
-
跟踪框:算法在图像上生成的可跟踪目标物体的矩形框。
-
X/Y方向速度:跟踪框对于目标物体的跟踪速度。根据目标物体在图像上的移动方向(从左至右或从上至下),跟踪速度分为横向跟踪速度和纵向跟踪速度两种,可分别通过下文参数配置中提及的X方向速度和Y方向速度配置。
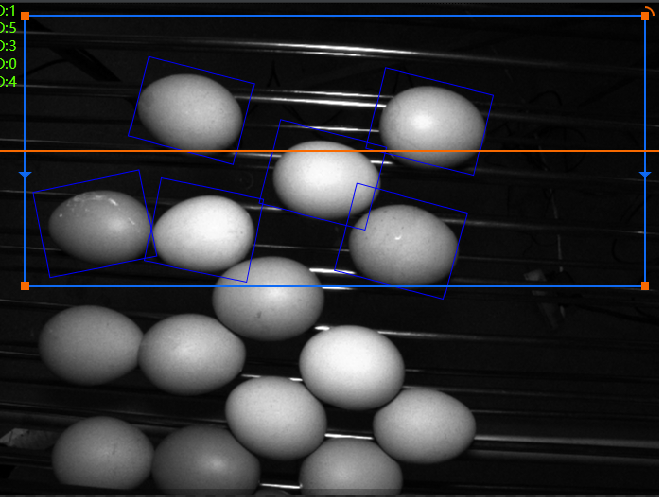
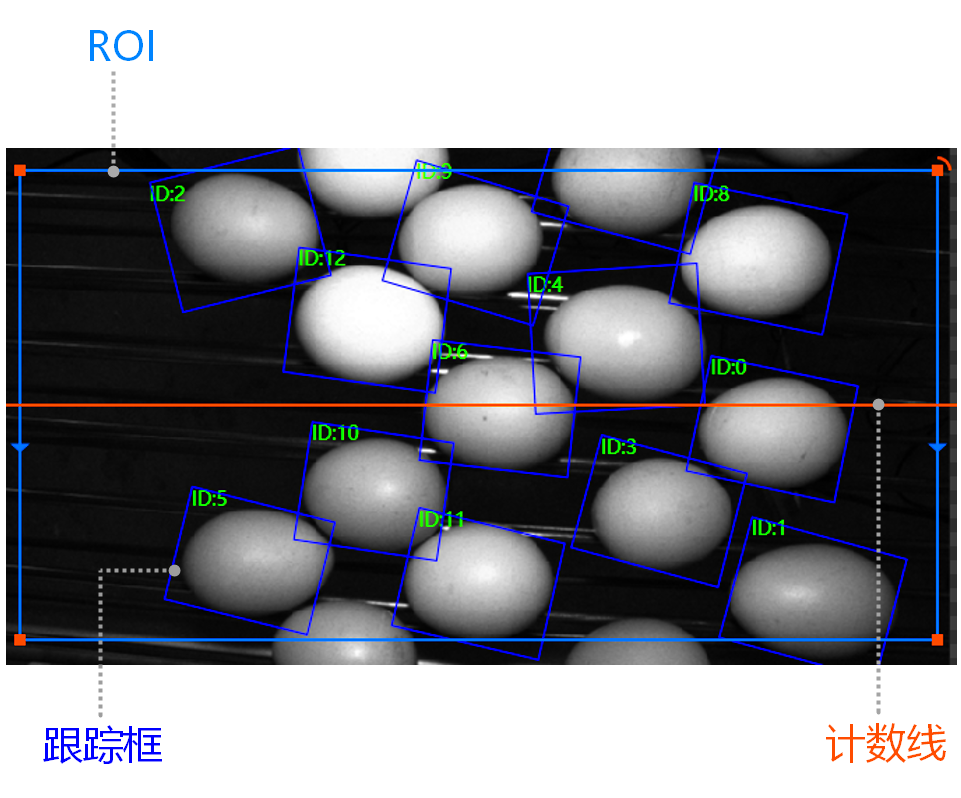 图 2 目标跟踪效果图
图 2 目标跟踪效果图使用方法
参数配置
以下仅介绍该模块的基本参数和运行参数的详情。通过配置基本参数,可定义数据输入。通过配置运行参数,可定义当前模块如何处理输入的数据。
说明:
结果显示参数详情,请参见结果显示。
基本参数详情如下。
- 图像输入
-
图像源为采集到的流水线上移动的目标的连续帧图像。图像必须按照采集的时间序列排序。
- BOX输入
-
为前序模块的输出目标信息矩形,可订阅目标信息矩形或检测区域。
- 检测区域
-
为跟踪和计数的区域。根据目标进入和离开该区域的状态对其进行计数
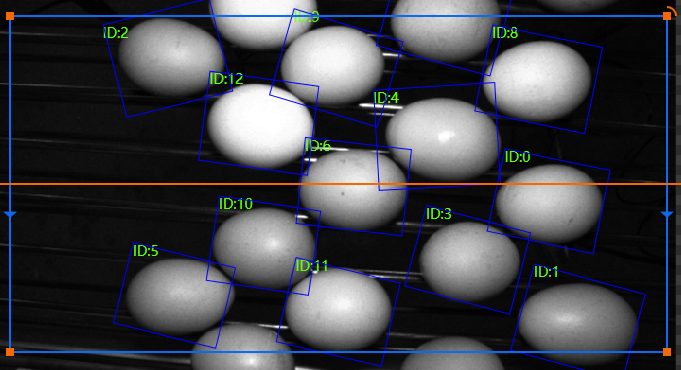
为了避免计数遗漏,检测区域应尽量位于图像中央,且:
-
区域宽度应尽量与图像宽度相同。
-
区域高度按目标尺寸进行设置,包含3~5个目标高度为最佳。
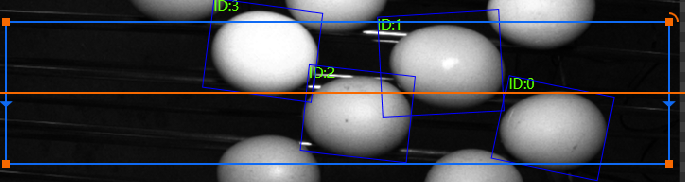
恰当和欠妥的检测区域选取,请参见如下四张示意图。
-
|
恰当的检测区域选取 |
检测区域高度过小 |
|---|---|
|
|
|
检测区域宽度过小 |
检测区域位置偏上 |
|---|---|
|
|
运行参数详情如下。
模块结果
该模块输出结果中各项参数详情,请参见目标跟踪模块的输出结果。