多直线查找
多直线查找模块可同时查找一个检测区域内的多条直线段,主要应用于半导体等行业的测量场景,如硅片间距测量和引脚间距测量。
本节内容包含:
使用场景
-
需要在同一区域定位多条直线时,如果使用直线查找模块,需要在流程中放置多个该模块。而如果使用多直线查找模块,仅需要放置单个该模块即可。
-
多帧图像的特定区域内,期望边线存在角度变化、位移、伸缩时,对多直线查找模块算法的影响较直线查找的较小。因为多直线查找搜索区域比直线查找的搜索区域更大。
使用方法
在流程中,多直线查找的:
-
后序模块可为线线测量和组合模块等。这些模块的处理多直线查找输出的直线数据,实现直线段间距的测量。
以下两张图所示的应用示例中,多直线查找输出的多直线信息,依次经组合模块中的变量计算、线线测量、图形收集和数据集合处理,最终输出多个直线段的间距。
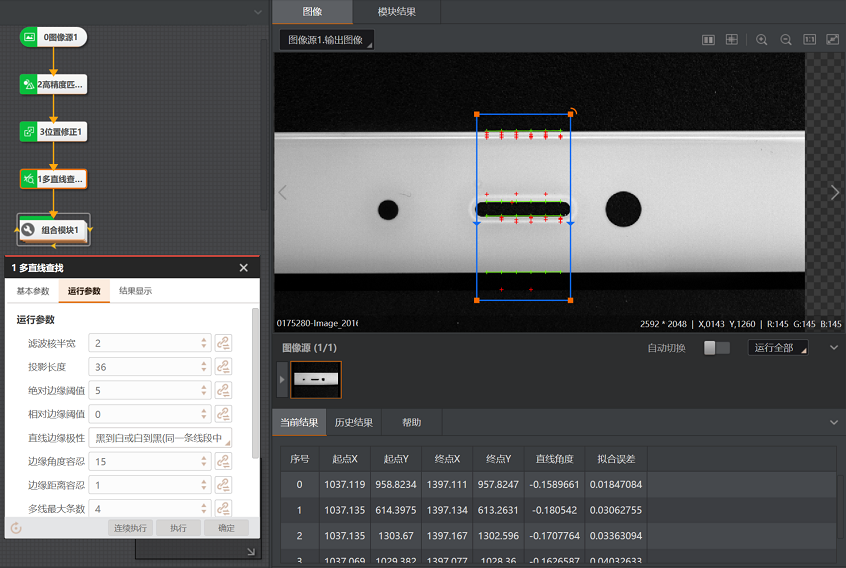 图 1 多直线查找输出多直线信息
图 1 多直线查找输出多直线信息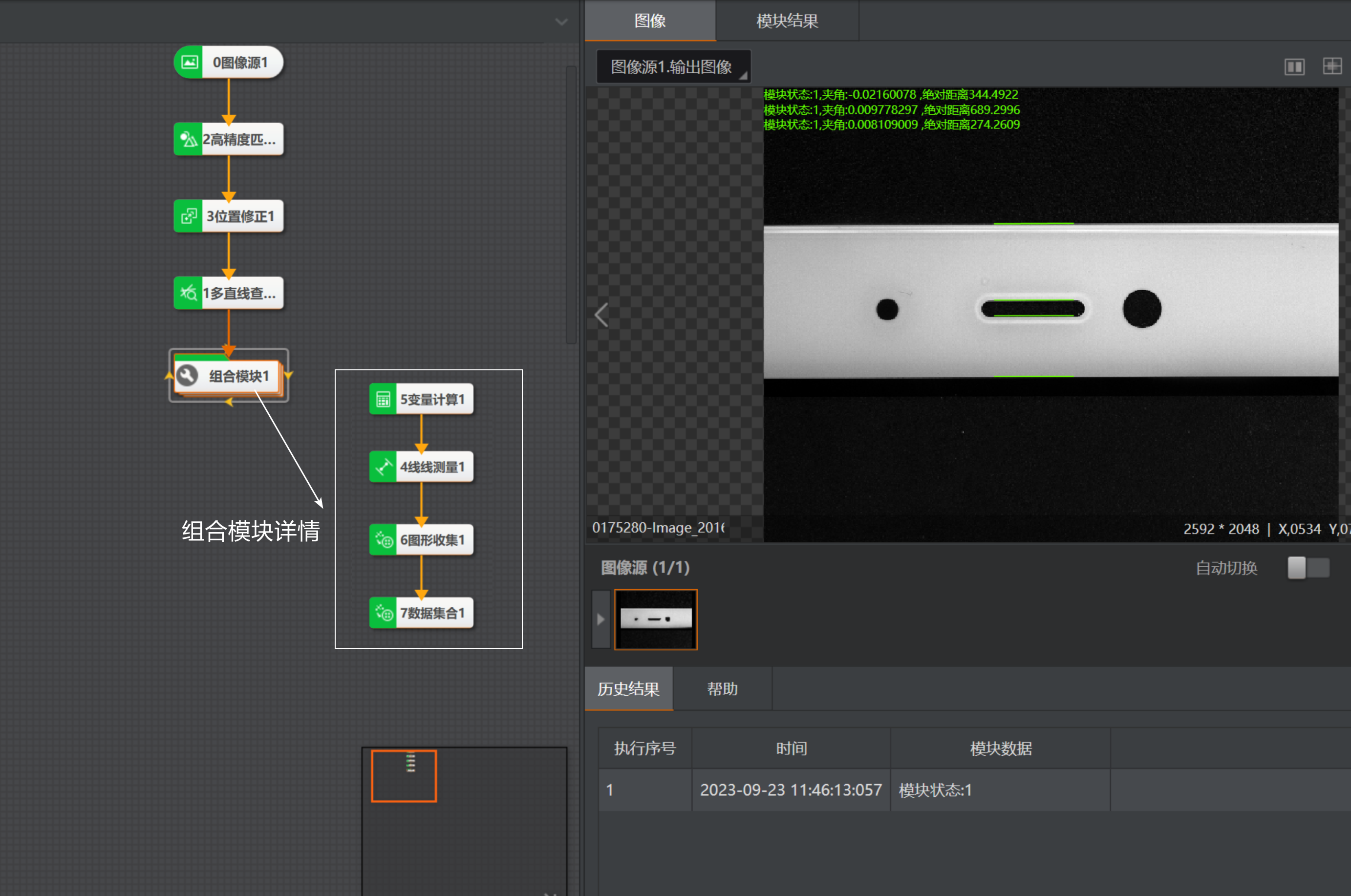 图 2 组合模块测量多线段间距
图 2 组合模块测量多线段间距参数配置
以下仅介绍该模块的运行参数详情。通过配置运行参数,可定义当前模块如何处理输入的数据。
|
参数 |
描述 |
|---|---|
|
滤波核半宽 |
用于增强边缘和抑制噪声,最小值为1。当边缘模糊或有噪声干扰时,增大该值有利于使检测结果更加稳定,但如果边缘与边缘之间挨得太近时反而会影响边缘位置的精度甚至丢失边缘。 |
|
投影长度 |
决定用于梯度场投影的区域的数量。该值越小,允许工具更细的粒度来分析图像,但可能导致更长的算法耗时。该值越大,算法耗时越小,但可能导致边缘无法被检测出。 建议该参数与滤波尺寸取相同值。 |
|
绝对/相对边缘阈值 |
只有边缘梯度阈值大于提取阈值的边缘点才可被检测出。 |
|
边缘极性 |
边缘的灰度变化类型。可选由黑到白、由白到黑、任意,更多详情见直线查找的同名参数。 |
|
边缘角度容忍 |
边缘点梯度方向与垂直于拟合直线的方向(拟合直线法线方向)的最大允许角度差。增加该值可使算法提取更多的边缘点,从而改变检测出的线段的位置。 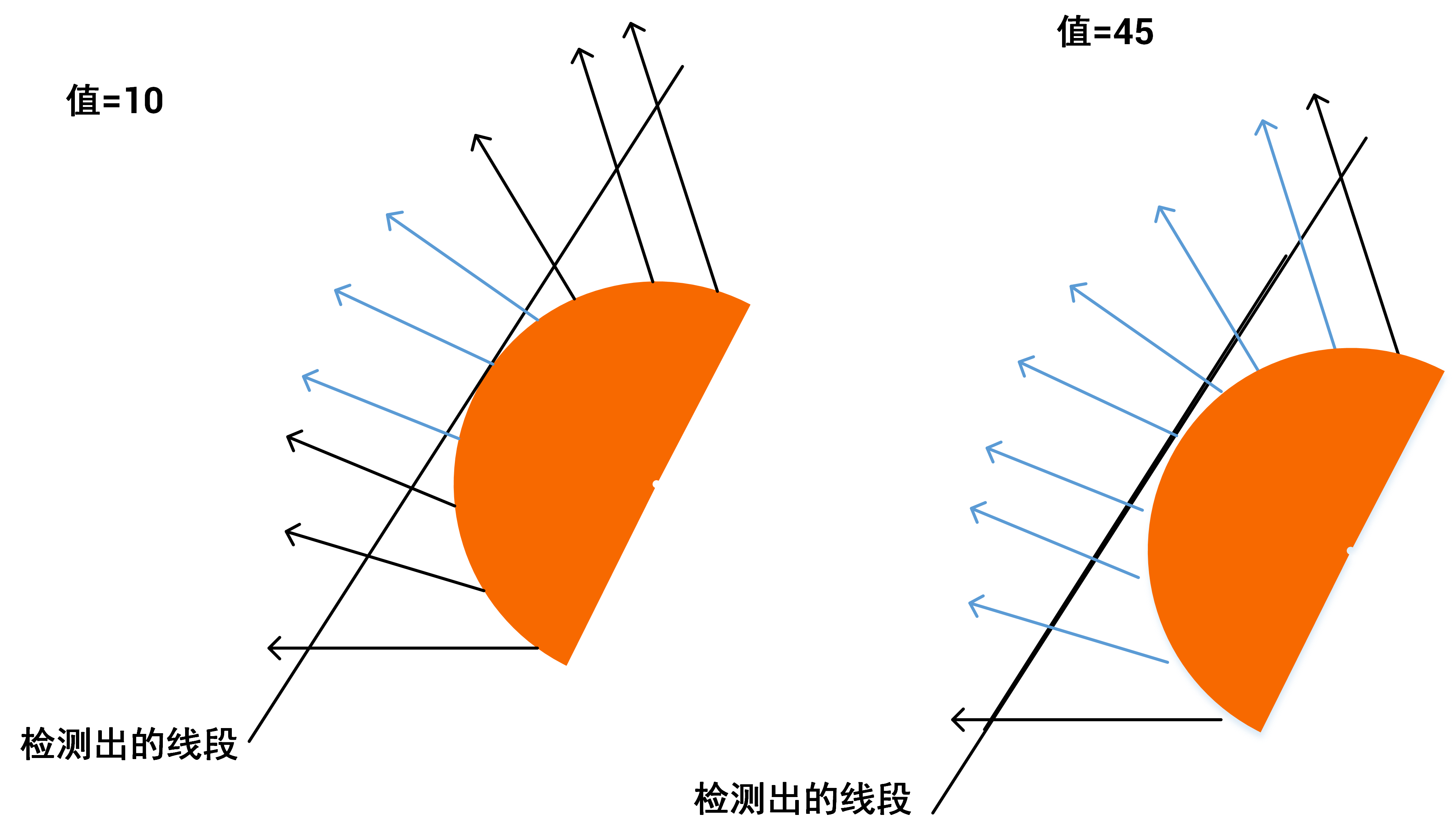
|
|
边缘距离容忍 |
边缘点与拟合线的最大允许距离。该值越大,算法提取更多边缘点,进而改变检测出的线段的位置。 |
|
多线最大条数 |
查找目标直线的最大条数。 |
|
覆盖率阈值 |
实际选用的边缘点数量占直线段理想使用的边缘点数量的最小百分比。该值越大,越倾向于输出覆盖率更高的直线段。 说明:
覆盖率越高并不说明覆盖的边缘点数越多。需要结合直线段实际长度综合考虑。 |
|
旋转角度容忍 |
所发现的线段的旋转量与定义的梯度搜索方向的最大偏差。该值越低,检测出的线段与梯度搜索方向的平行度越高。 |
|
拟合方式 |
两种拟合方式只是权重的计算方式有些差异。随着离群点数量增多以及离群距离增大,可逐次使用huber、tukey。 |
模块结果
该模块输出结果中各项参数详情,请参见多直线查找模块的输出结果。