单点映射对位
该模块主要用于上相机拍目标、下相机拍对象的对位贴合场景。其作用是通过下相机拍物料、上相机拍料盘,再根据输入对象点的位置和角度、以及目标点的位置和角度,计算出对象点对位贴合到目标点需要的移动量,包括位置移动量和角度移动量。
本节内容包含:
模块原理
单点映射对位模块需与平移旋转标定模块和映射标定模块配合使用,该模块适用于上下两个相机做对位的场景。静止下相机和运动机构通过标定得到下相机图像坐标系和运动机构物理坐标系的转换关系(即标定矩阵M),上下两个相机通过映射标定得到两个图像坐标系之间的转换关系。单点映射对位再根据两个标定矩阵和输入的特征点位信息将图像特征点转换到运动机构的物理坐标系下,从而推算对位坐标,用于引导运动机构进行对位贴合。
运动机构携带基准物料到静止下相机的示教物理点P1,此时下相机拍摄特征点像素坐标p1和对位直线角度;而上相机回到拍照位P2拍摄需要贴合的对象,提取对象点及对位直线的起点和终点。
将上相机对象点及直线起点和终点通过映射标定文件映射到下相机的图像坐标系内,再通过下相机和运动机构的平移旋转标定矩阵将坐标转换到机构坐标系下,从而计算出对位偏差。
使用方法
该模块还需与图像源模块和定位类模块配合使用。图像源模块用于获取图像,定位类模块用于获取图像特征点和角度信息。单点映射对位模块订阅对象特征点及角度、目标特征点及直线的起点和终点、示教物理点及标定文件,从而计算出对象到目标的相对偏移量和绝对抓取坐标。如下图所示。
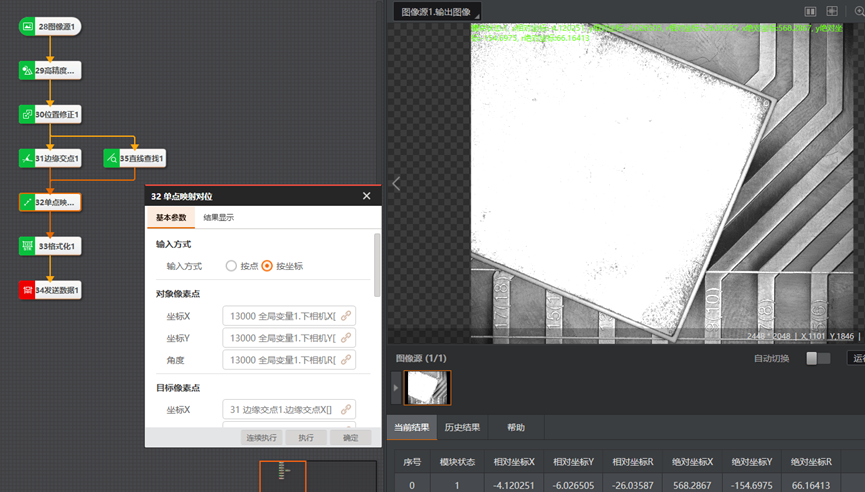 图 1 使用示意
图 1 使用示意参数配置
此处仅对该模块的基本参数进行介绍,结果显示各模块大同小异,此处不再赘述,具体参见结果显示。
 可分别选择需加载的N点标定和映射标定的标定文件。
可分别选择需加载的N点标定和映射标定的标定文件。模块结果
该模块的模块结果涉及参数请参见单点映射对位。